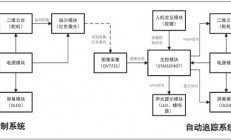
本文介绍一种基于OpenMV的目标运动控制与自动追踪系统进行物料夹取,探讨如何充分利用开源技术和高性能硬件,以满足不断增长的机器视觉应用需求。系统由两个相互独立的系统组成,方案框架如下图所示。 图1 系统框架图 &nb...
 技术客
技术客