 技术客
技术客基于OpenMV的目标运动控制与自动追踪系统的夹取机器人
本文介绍一种基于OpenMV的目标运动控制与自动追踪系统进行物料夹取,探讨如何充分利用开源技术和高性能硬件,以满足不断增长的机器视觉应用需求。系统由两个相互独立的系统组成,方案框架如下图所示。
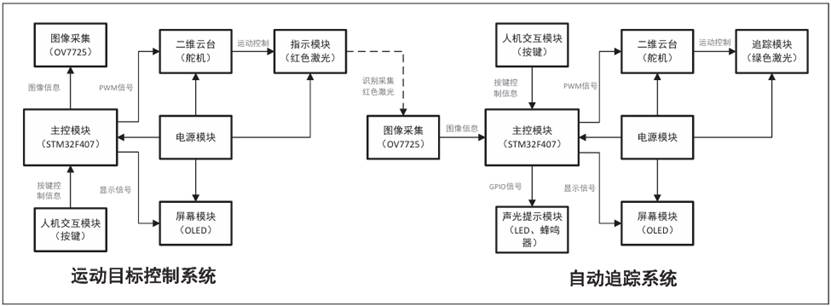
图1 系统框架图
整个系统主要由机械臂自带电控箱以及移动小车控制系统:锂电池,单片机,Openmv和OLED屏幕,降压稳压模块,分电电路板组成。
运动目标控制与自动追踪系统均通过转动云台来调整激光的指向,每个云台由两个大力矩舵机组成,可以实现水平和垂直方向上的自由移动,使激光具有更大的指示范围。云台安装采用下图所示的安装方式,此种安装方式垂直方向舵机负载小,舵机旋转更灵敏,角度控制更准确。

图2 舵机结构图
械手是智能物流机器人的关键组件,其设计的难点在于械手抓取范围广、自由度高,且能够补偿底盘位置的误差。此外械手要有足够的刚度,以保证组件推进的位置准确。采用多轴串联方案设计的械手存在多轴之间累积误差大、稳定性差、结构刚度较 小等问题,使用并联式方案设计的机械臂夹爪始终与 地面平行,夹、放物块有很高的稳定性。本文采用并联式械手作为夹取装置。
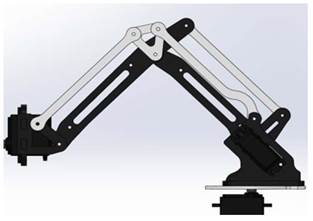
图3 并联式械手
械手夹爪采用了连杆机构设计,活动空间较大。机械夹爪中心预留放置摄像头的位置,结合比赛的物料形状,设计了如图1(d)所示的爪头,爪头内侧大部分为过渡曲线,即使存在偏差,也能通过施加预紧力滑至预定夹紧位置。爪头配合舵机抓取范围比较大,方便控制。
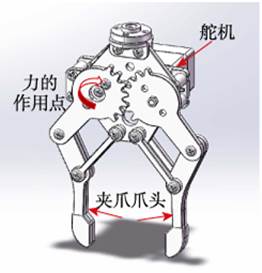
图5 机械夹爪结构图
为保证机器人能够在复杂的环境中稳定运行,且快速、准确地完成搬运任务。选择了基于全向移动平台的麦克纳姆轮作为驱动轮,使机器人可在任意方向上灵活运动。麦轮平台运动学模型是建立4个麦轮 转速与几何中心速度之间的关系,如图6所示。其逆运动学模型解算是已知麦轮平台中心点的速度,计算四个麦轮的转速,从而控制四个电机达到相应的要求。
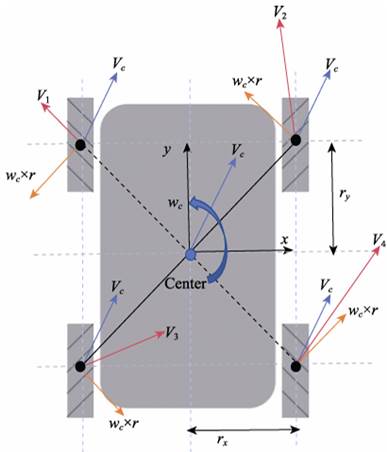
图6 麦轮运动分解图
机器人的视觉系统要承担色环识别、位姿反馈校正等任务,同时要求能够根据记录的抓取顺序实现选择性识别。整体采用状态模式设计如下图所示。
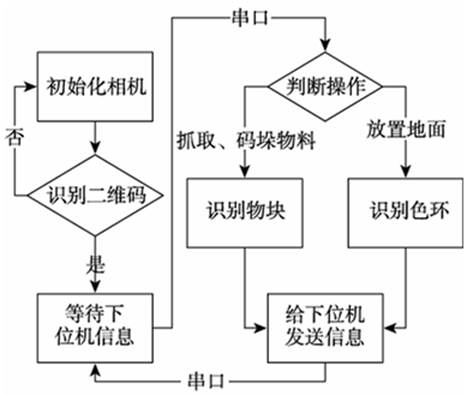
图7 视觉任务流程图
考虑到供电电源与各用电设备之间的电压差异,本文采用TPS5430降压芯片,该芯 片具有噪声小、带载能力强等特点,可将12V降压为5V与3.3V。降压电路如下所示。
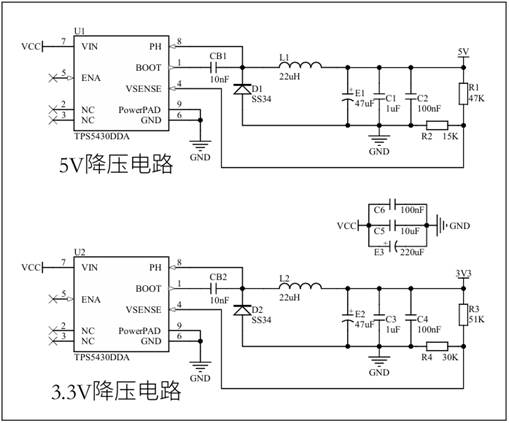
图8 降压电路图
OpenMV视觉系统被集成进来是一位其是一个开源,低成本,功能强大的机器视觉模块上面集成了STM32F427微处理器与OV7725摄像头芯片,在小巧的硬件模块上,用C语言高效地实现了核心机器视觉算法,同时也提供Python编程接口,主要功能是将视觉数据转化为实际控制指令,这些指令用于控制二维云台,使其追踪和定位目标,实现了对运动目标的精确控制。这种整合视觉和控制的方法,不仅提高了系统的准确性,还确保了实时性。OpenMV能够精确识别红色和绿色激光点的位置,并将它们的坐标位置传输给STM32,从而启动数据处理流程。在这个智能系统中,红色激光点被设定为目标位置,而绿色激光点则表示当前位置。此外,基于用户体验的考虑,通过添加OLED屏幕界面,用户可以轻松地进行人机交互,实时显示图像、传感器数据或其他信息。
控制系统的供电全部来自锂电池。电压引入降压稳压模块生成稳定的直流电并通过分电板提供给单片机,Openmv和OLED屏幕。团队绘制了分电板,将单片机的引脚引到电路板的输入端口,电路板的输出端口采用端子并于传感器连接,使得系统的稳定性提升。
单片机作为系统的核心控制器,是系统信号流动的核心。其接受陀螺仪传输的角度信息,导向对中系统传输的位置信息,并向屏幕传递任务信息,向舵机传递机械臂解算后的位置信息,向电机传递速度信息。
控制系统设计能够满足械手的位姿控制、组件推进及姿态的调整、运动机构的控制。
系统的信号传递如下所示。
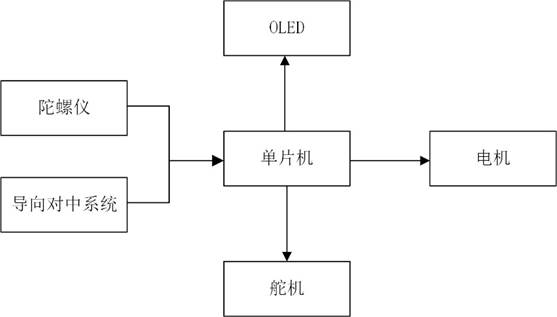
图9 信号传输图


